grove/grove-rotary-angle-sensor
可変抵抗の回転量をシリアルモニタに表示するスケッチです。
概要
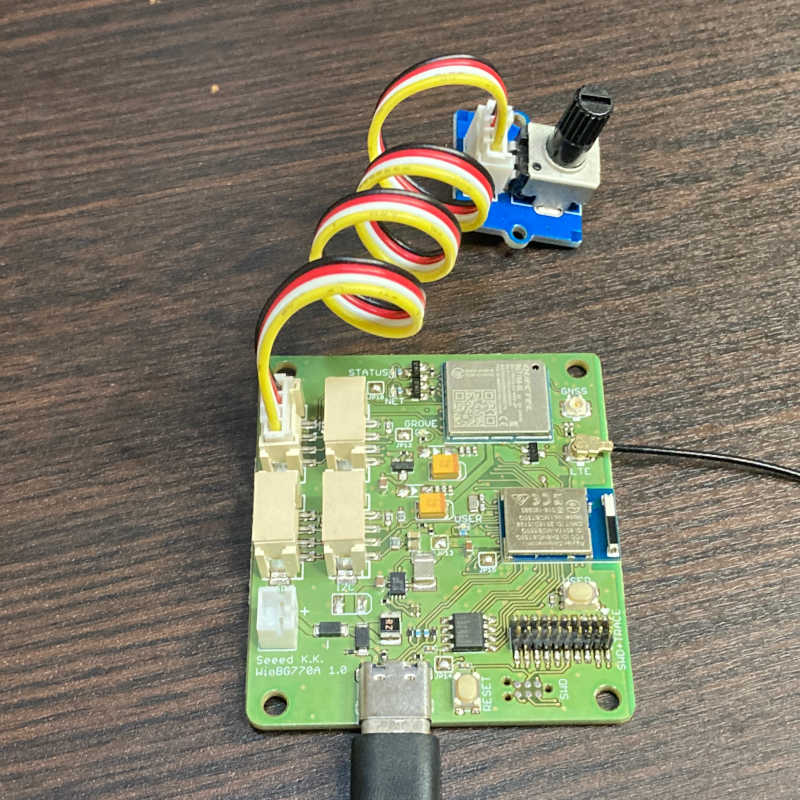
このスケッチはGrove - Analogの使用例です。 Grove - Analogコネクタに接続したGrove - Rotary Angle Sensorのノブ回転位置をシリアルモニタに表示します。 表示の周期は0.5秒です。
詳細
WioCellular.hをインクルードして、WioCellularインスタンスを使えるようにします。
#include <WioCellular.h>
セルラーモジュールとのインターフェースを初期化して、Groveの電源を投入します。
WioCellular.begin();
digitalWrite(PIN_VGROVE_ENABLE, VGROVE_ENABLE_ON);
アナログ入力の分解能(ビット数)を14ビットに変更します。 (デフォルトは10ビットです。)
analogReadResolution(14);
analogRead()で回転位置に対応した値を取得します。
const auto rotaryAngleRaw = analogRead(ROTARY_ANGLE_PIN);
analogRead()の値はADコンバーターで、
- アナログ入力の電圧をゲインで増幅
- 増幅した電圧を基準電圧で指定した分解能のデジタルに変換
と計算されています。
ADコンバーターは、
- ゲイン … 1/6
- 基準電圧 … 0.6V
- 分解能 … 14ビット
と設定されているので、次の計算でアナログ入力をアナログ入力電圧に換算します。
const auto rotaryAngleVoltage = (float)rotaryAngleRaw / 16383 * 0.6f / (1.0f / 6);
そして、横棒グラフの長さを計算しやすいように、アナログ入力電圧0~3.3Vを0~1に正規化します。
const auto rotaryAngle = rotaryAngleVoltage / 3.3f;